…un progetto ideato da Cecilia Lalatta Costerbosa
Introduzione
Il Parametric Hybrid Wall è un progetto protetto da proprietà intellettuale anche se scaricabile e modificabile gratuitamente.
L’idea di questo progetto nasce con l’intento di creare un progetto destinato all’Exhibition Design.
L’idea è quella di progettare una struttura di tipo architettonico, possibilmente autoportante, scalabile a seconda della destinazione, ma non necessariamente coerente con l’ambiente in cui è installata. Infatti, è importante sottolineare la prerogativa percettiva ed effimera: altre applicazioni, anche in un contesto simile, sarebbero meno consistenti rispetto al tema della Mostra.

Tre principali caratteristiche hanno influenzato la realizzazione del prototipo:
- La scalabilità del progetto
- La destinazione o posizione
- L’impatto percettivo.
Per quanto riguarda l’aspetto cinetico di una Superficie Responsiva (un’architettura in grado di modellare la propria forma in relazione a specifici impulsi contestuali), il concetto fornisce un sistema di apertura e chiusura di alcuni elementi al fine di ottenere una superficie dinamica che può essere “aperta o chiusa”. Questo aspetto, se associato ad una particolare situazione, può acquisire un ruolo centrale nella fruizione delle Superfici Responsive.
Parametric Hybrid Wall
Il Parametric Hybrid Wall non solo presenta queste caratteristiche preliminari, e di conseguenza quella di essere una superficie responsiva, ma anche si delinea come un ulteriore processo che combina l’approccio parametrico di pianificazione con strumenti specifici per l’Open Source e la modellazione Low Cost e prototipazione.
Concetti: Grid Texture & Skin
L’idea di partenza era di quella di creare una superficie in grado di reagire a stimoli esterni per cambiare il suo aspetto
e funzione in base alla variazione della forma acquisita. Da qui, si pensa a una forma che è in grado di subire variazioni sia di forma che di struttura. Per questo motivo, il progetto parte da una griglia di base, necessariamente geometrica e “combinata” per assumere nuovo forme una volta modificata la sua forma iniziale. L’unità di base del progetto che soddisfa con successo la maggior parte delle prerogative è quindi il triangolo, che, nel mio caso, viene ottenuto con l’intersezione di una griglia esagonale e una griglia a diamante, come mostrato nello studio qui sotto.

Nella ricerca di questa geometria, era fondamentale portare avanti un’analisi approfondita dell’architettura cinetica. Ciò ha comportato l’elaborazione di molte idee, come le creazioni di Theo Jansen e di altre opere del visionario Zaha Hadid, fino ad arrivare a quelli identificate come Superfici Responsive: le superfici possono essere modificati in funzione di un ingresso sia virtualmente che meccanicamente.
Le Superfici Responsive assumono una varietà di funzioni per la loro caratteristica meccanica e strutturale, ma anche per l’estetica che presentano: infatti, spesso costituiscono “skin” esterni (in gergo chiamato skin), esterna o superficie della struttura sottostante.
L’immagine sopra riporta una sequenza di superfici Responsive che sono stati studiati e costruiti per il Bahari Torri, costruito e inaugurato nel mese di agosto 2013 di Abu Dhabi, con lo scopo di moderare la radiazione solare sulla superficie delle due torri attivando un sistema di energia risparmio e riciclaggio sfruttando la luce della somma.
Tuttavia questo progetto di tesi si sforza di sottolineare, piuttosto, il concetto di texture; ripetizione di un modulo che crea un ritmo nella struttura, una sorta di disegno geometrico intrinseco nella struttura, ciò che si integra con l’architettura in sé, invece di comporre un sovrastante strato indipendente.
Concetto: la Superficie Responsiva
Ecco la motivazione delle scelte precedentemente introdotte: una struttura che intrinsecamente e strutturalmente possiede la capacità di cambiare la sua forma genera un’architettura dinamica, versatile e funzionale a seconda dello scopo essa deve assumere.
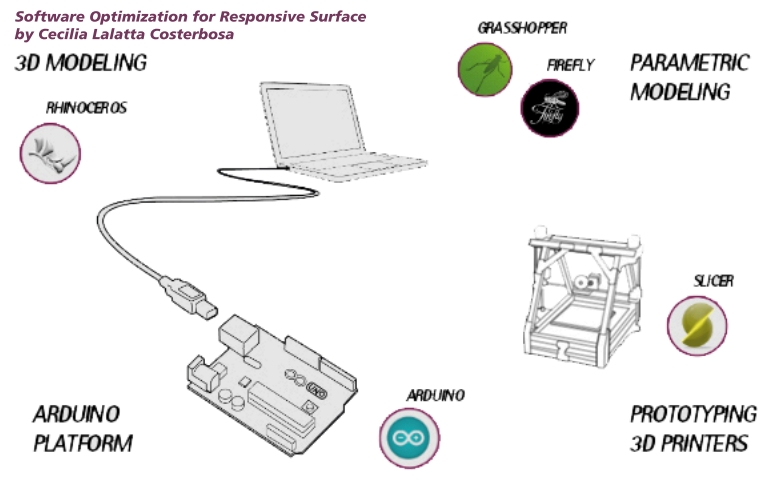
L’aspetto innovativo ricade principalmente sulle tecniche compositive della tipologia di questo prodotto: per ottenerla sulla superficie reattiva dalla griglia mostrata prima, è stato necessario modellarne la forma con Rhino e Grasshopper, che consentono un tipo di approccio parametrico al progetto.
Grazie a Grasshopper, è stato possibile modellare una superficie in grado di aprirsi o chiudersi in funzione di alcuni parametri variabili definiti da un ingresso esterno. (Vedi sotto l’immagine di Rodrigo Medina)


La composizione del modello cinetico
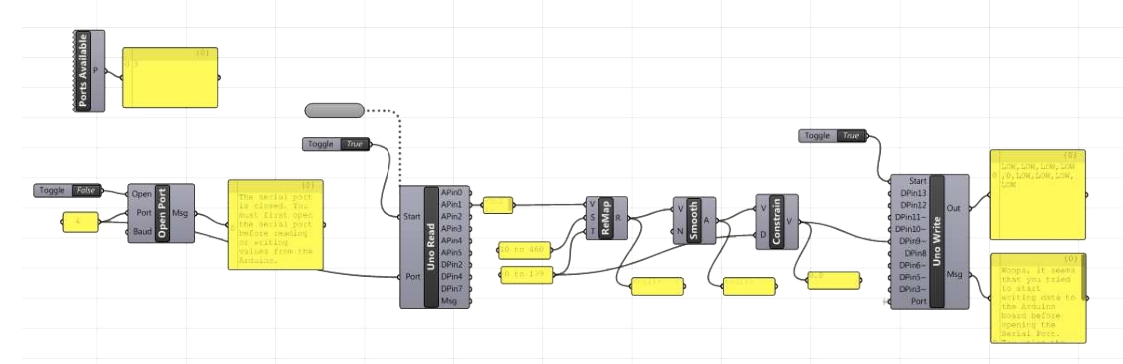
L’immagine seguente rappresenta una sintesi dell’intero progetto di tesi per quanto riguarda la parte virtuale della modellazione della struttura, la composizione del modello cinetico.
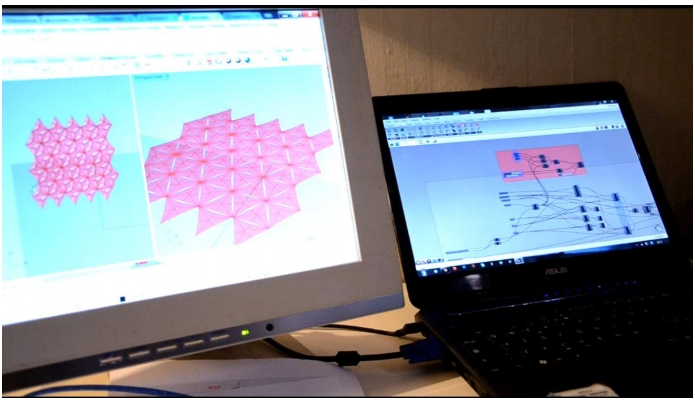
I vari componenti (individuate dalle caselle grigie) rappresentano la costruzione del modello in 3D nonché i collegamenti relativi. È possibile gestire tutti gli elementi di questo progetto tramite Grasshopper: dalla quantità di moduli alle loro aperture o chiusure, agli ingressi definiti dal sensore e alle uscite inviate dal motore, sono tutti controllati da più componenti specifici gestiti sia da Arduino che da Grasshopper.

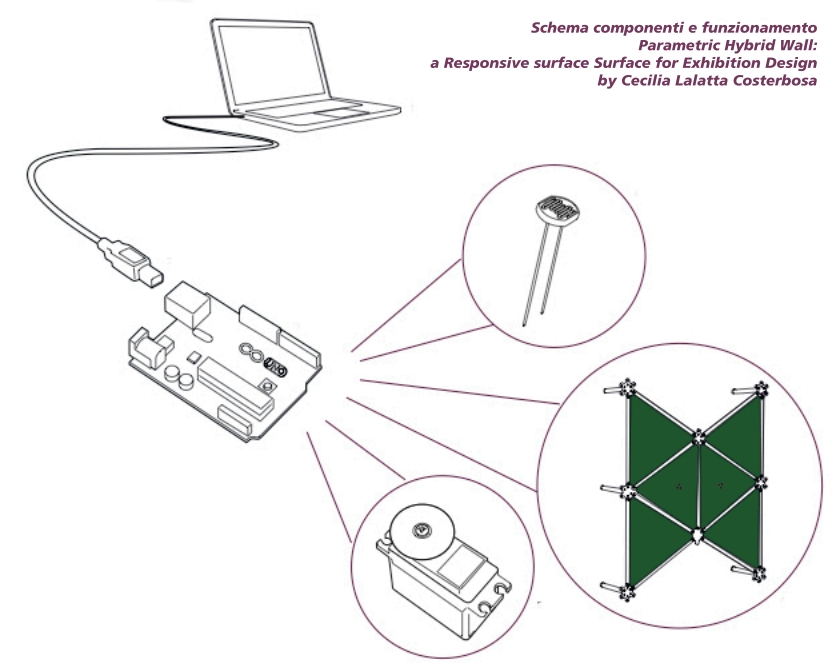
Le immagini sopra rendono evidente il passaggio che permette il collegamento tra Grasshopper e Arduino: usando la porta, dopo aver collegato Arduino ad un computer, si avvierà lo scambio di informazioni tra i segnali di ingresso e uscita. Arduino unisce non solo il modello 3D con la piattaforma ma lega anche le reazioni del sensore al server, che a loro volta sono collegati ai parametri variabili della structura modellizzata. Quindi crea un circuito che permette il collegamento della reazione effettiva, determinata dalla differenza di luce ricevuta dal sensore (ingresso), attraverso la trasmissione al server che, essendo collegato al modello, risponde con il movimento della struttura.
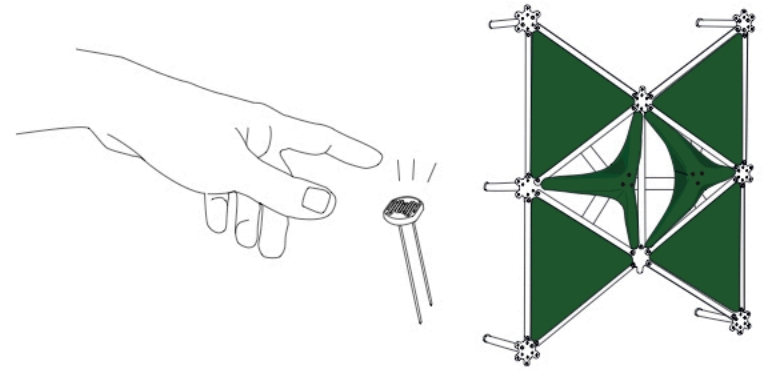
La superficie assume forme diverse a seconda degli stimoli che sono collegati ad uno spettro di variabili classificate come sensori. La deformazione della superficie avviene successivamente all’impulso ricevuto: il dinamismo di queste strutture è il risultato dell’interazione tra l’utente finale, che agisce sui sensori, e la superficie, che modifica la propria forma dopo essere stata sottoposta agli stimoli dei sensori.
La figura sottostante mostra un diagramma dei componenti in Grasshopper utilizzati per gestire le aperture della superficie responsiva via Wi-Fi.

Touch OSC è un software per il controllo MIDI e OSC tramite dispositivi come iPhone, smartphone e tablet. L’interfaccia consiste in una serie di comandi a sfioramento che inviano e ricevono i messaggi direttamente alla struttura. Se viene inserito nel circuito indicato sopra, questo plug-in collegherà il dispositivo direttamente alla struttura per mezzo di uno sketch realizzato su Arduino.
L’immagine mostrata qui sotto, è un piccolo esempio dell’interfaccia.

L’utente è quindi in grado di interagire con la struttura, che reagisce agli ingressi inviati direttamente dal dispositivo dell’utente.
La fase meccanica
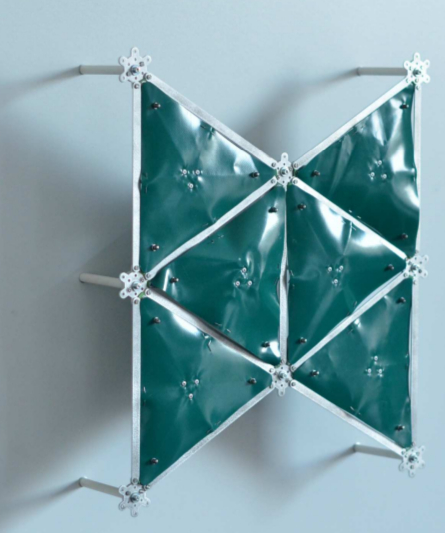
La meccanica del prototipo era stata realizzata in funzione della forma precedentemente modellata in 3D. Realizzando la parte meccanica, era stato necessario modellizzare i profili ad hoc, che sono stati progettati, anche in questo caso, con Rhinoceros.
Il prototipo è composto modularmente con elementi che possono essere assemblati in una forma triangolare.
La base del triangolo (A) è preceduta dalla griglia nel modo discusso prima. Il triangolo è a sua volta suddiviso in tre triangoli (A1, A2, A3) generati dalla connessione dei punti medi di ciascun lato. Questo punto di intersezione definisce l’asse su cui movimenti avvengono che permette al sistema di apertura e chiusura costituito da A1, A2 e A3.
Questo approccio consente la scalabilità del progetto per adattarlo a qualsiasi proposta di progetto.

Per scaricare il libro del progetto:
{kind=link}
Prossima esposizione
Il progetto sarà esposto a dicembre a Doha in Qatar (leggi qui).