Prima di cominciare ad affrontare i manipolatori e la robotica in generale, è molto importante conoscere la loro struttura e le possibili configurazioni. Tra tutte le possibili strutture, create dalla combinazione tra corpi solidi e giunti, infatti solo alcune si sono dimostrate efficaci nello svolgere particolari compiti. In questo articolo vedremo le configurazioni più comuni utilizzate nell’industria e nelle applicazioni di robotica più utilizzate.


La struttura di un robot manipolatore
Un manipolatore può essere definito come una cantina cinematica composta da:
- Corpi rigidi
- Giunti (rotoidali e prismatici)
Nel manipolatore si individuano principalmente: una struttura portante che deve assolvere alle funzioni di mobilità, un polso che aggiunge destrezza e precisione, ed infine un organo terminale che ne svolge il compito, chiamata appunto estremità efficace.
Una catena cinematica è caratterizzata inoltre da due estremità. Una è la base che è vincolata all’ambiente, e che ha lo scopo di fissare e sostenere il manipolatore, L’altra è l’estremità efficace che svolge una particolare funzione che è poi il compito del manipolatore.
La natura dell’organo terminale dipende appunto dal compito che deve svolgere il manipolatore. Se questo dovrà afferrare un oggetto, spostarlo e posizionarlo, si tratterà certamente di una pinza. Mentre se invece il manipolatore dovrà effettuare operazioni di taglio o di assemblaggio, l’organo terminale potrà essere uno strumento come una fresa, un trapano o un saldatore.
I giunti: movimento e gradi di libertà del manipolatore
Per effettuare il suo compito, il manipolatore dovrà assicurare il perfetto movimento dell’organo terminale. Il movimento complessivo di un manipolatore è realizzato attraverso la somma dei movimenti elementari dei singoli corpi rigidi relativamente ai loro giunti.
I giunti sono di due tipologie:
- prismatici
- rotoidali

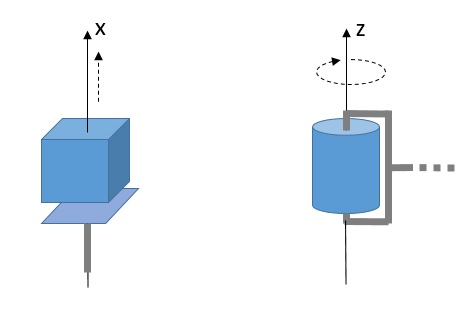
Un giunto prismatico è un collegamento tra due corpi solidi che permette un movimento lineare tra di loro. Questo movimento spesso viene attuato dallo scivolamento di due parti interconnesse.


Un giunto rotoidale è un collegamento tra due corpi solidi che permette la rotazione tra di essi su di uno specifico asse.


Dato che il manipolatore è una catena cinematica aperta, ogni giunto aggiunge un grado di libertà al sistema (DOF). Quando si realizza un manipolatore, i giunti devono essere scelti con opportuna cura ed in numero sufficiente per fare in modo che il manipolatore possa effettuare il suo compito correttamente.

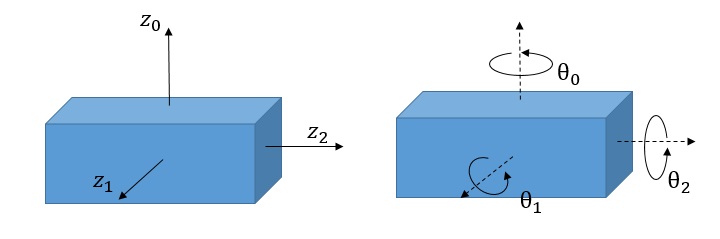
Per posizionare ed orientare correttamente l’organo terminale in uno spazio tridimensionale, sono necessari 6 gradi di libertà, di cui 3 sono per la posizione e 3 sono per l’orientamento. Se il manipolatore ha più gradi di libertà di quelli necessari, si dice ridondante.

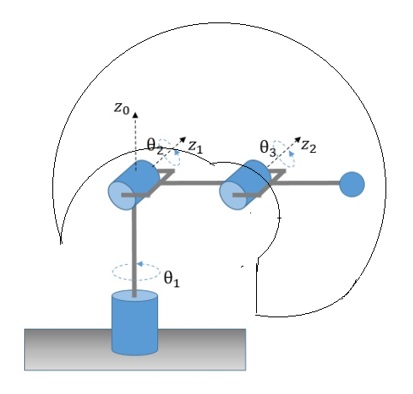
Quando si parla di movimento di un robot manipolatore è necessario definire lo spazio di lavoro. Questo non è altro che la porzione di spazio in cui può accedere ed operare l’organo terminale.
Le configurazioni più comuni dei manipolatori
Come possiamo facilmente intuire, variando il numero e la tipologia dei giunti si possono ottenere tantissime configurazioni di manipolatori. Tra queste ci sono alcune particolari configurazioni che si sono dimostrate più efficienti nello svolgere particolari compiti. Infatti a seconda della particolare configurazione si possono ottenere diversi spazi di lavoro.

Queste configurazioni sono caratterizzate in maniera particolare dalla sequenza dei giunti che la compongono, indicando con R per un giunto rotoidale e P per un giunto prismatico.
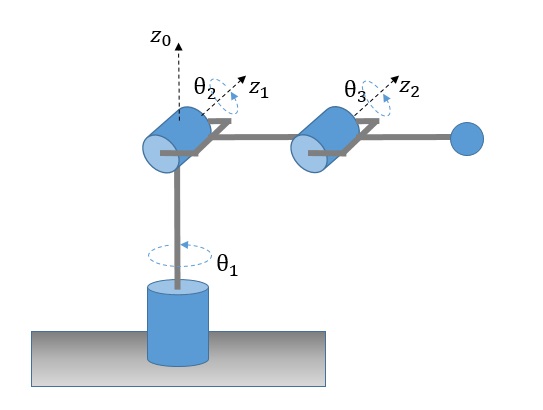
Manipolatore articolato (RRR)
Questo tipo di manipolatore viene anche chiamato manipolatore rotante o manipolatore antropomorfico. La sigla RRR indica i tre diversi giunti in catena tutti e tre rotanti.


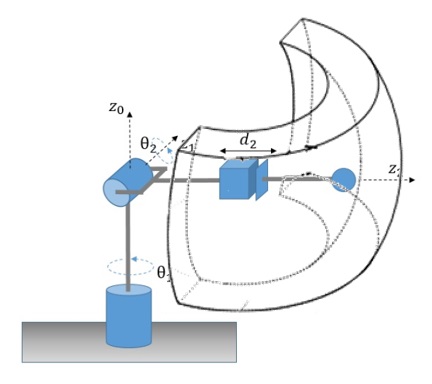
Manipolatore sferico (RRP)
Sostituendo nella sequenza dei giunti, il terzo giunto da rotante a prismatico si ottiene il manipolatore sferico. Questo nome deriva dal fatto che le coordinate sferiche definiscono perfettamente la posizione dell’estremità efficace rispetto al punto di origine che corrisponde all’altra estremità del manipolatore, cioè la base.

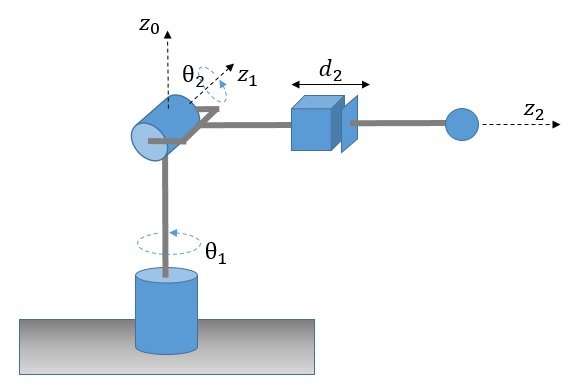

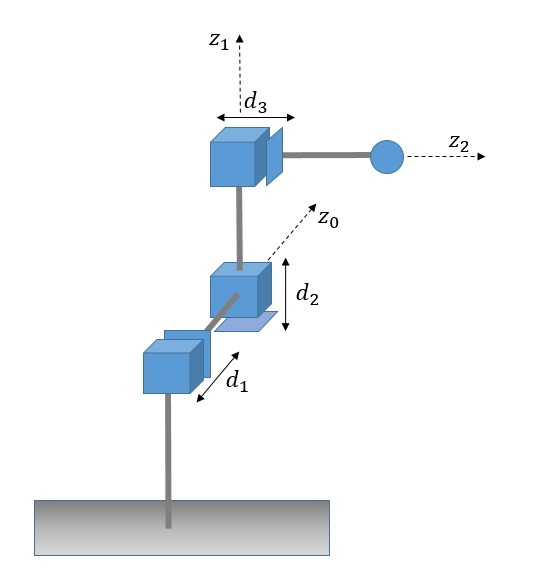
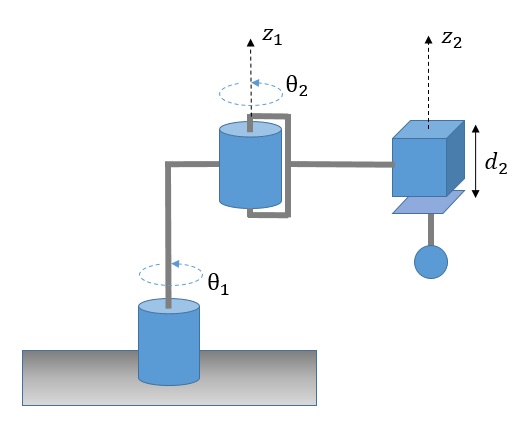
Il manipolatore SCARA (RRP)
La sigla SCARA sta per Selective Compliant Articulated Robot for Assembly, ed è una tipologia di manipolatore molto usata. Sebbene lo SCARA abbia una struttura RRP dei giunti identica a quella del manipolatore sferico, è differente sia nell’aspetto che nella tipologia di applicazioni. A differenza del manipolatore sferico che ha l’asse z0 perpendicolare all’asse z1, e l’asse z1 perpendicolare all’asse z2, il manipolatore SCARA ha gli assi z0,z1 e z2 paralleli tra di loro.



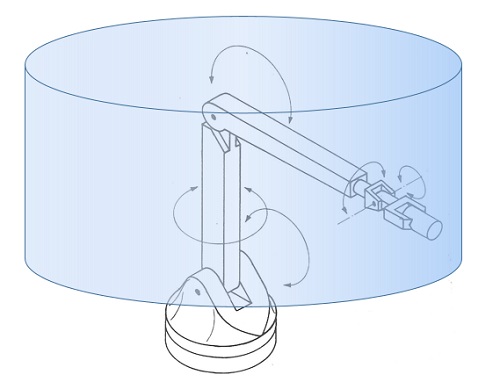
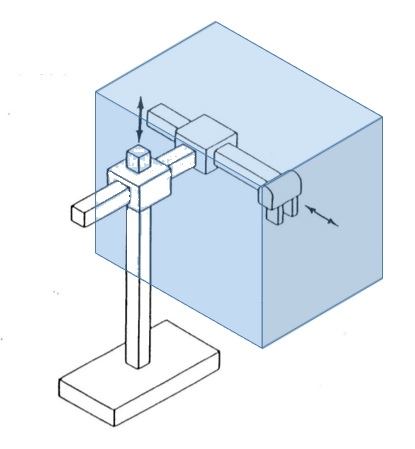
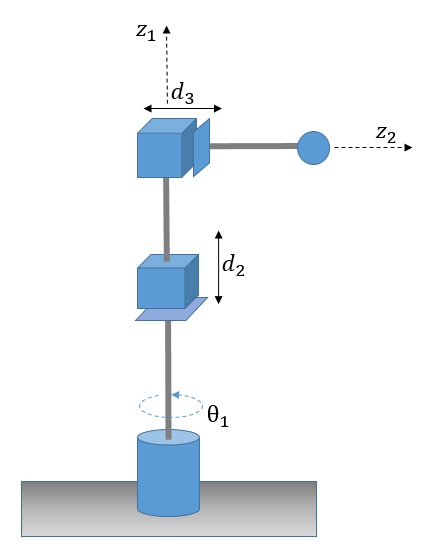
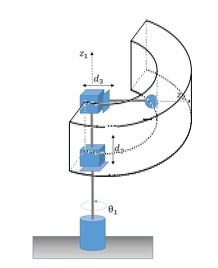
Manipolatore Cilindrico (RPP)
In questo caso solo il primo giunto è rotante e produce una rotazione intorno alla base, mentre il secondo e terzo giunto sono prismatici.


Manipolatore Cartesiano (PPP)
In questo tipo di manipolatore, tutti e tre I giunti sono di tipo prismatico. Per questo tipo di manipolatore le coordinate dei giunti non sono altro che le coordinate cartesiane dell’estremità efficace rispetto alla base (altra estremità). Come possiamo attenderci, la descrizione cinematica di questo manipolatore è la più semplice di tutti.