….a project designed by Cecilia Lalatta Costerbosa
Introduction
The Parametric Hybrid Wall is a project protected by intellectual property even if free downloadable and editable.
The concept of this project started with the intention of creating a project intended for Exhibition Design.
The idea is to design a structure of architectural type, possibly self-supporting, scalable according to the destination but not necessarily consistent with the environment in which it is installed.In fact, it is important to emphasize the perceptual and ephemeral prerogative: other applications, even in context, would be less consistent with respect to the theme of the Exhibit.

Three principal decisions have the affected the realization of the prototype:
- The scalability of the project
- The destination or location
- The perceptual impact.
With regard to the kinetic aspect of Responsive Surface (an architecture able to model its own shape in relation to contextual specific impulses), the concept provides a system of opening and closing some elements in order to obtain a dynamic surface that can be “open or close itself”. This aspect, when associated with a particular situation, may acquire a central role in the fruition of the Responsive Surface.
Parametric Hybrid Wall
Parametric Hybrid Wall not only presents these preliminary characteristics, hence resulting to be a responsive surface, but also it outlines a further process which combines the planning parametric approach with specific instruments for Open Source and Low Cost modelling and prototyping.
Concepts: Grid Texture & Skin
The idea of departure was to create a surface able to react to external stimuli in order to change its appearance and function according to the acquired change of shape. From here, one thinks of a shape that is able to undergo changes in form and structure. For this reason, the project starts from a basic grid, necessarily geometric and “combined” in order to take on new forms once modified from its initial form. The basic unit of the project that most successfully meets this prerogative is then the triangle, which, in my case, is obtained by the intersection of a hexagonal grid and a diamond grid, as exemplified in the study below.

In the search for this geometry, it was fundamental to pursue an in-depth analysis of kinetic architecture; this involved processing many ideas, such as the creations of Theo Jansen and other works by the visionary Zaha Hadid, until arriving at those identified as Responsive Surfaces: surfaces can be modified as a function of input both virtually and mechanically.
Responsive Surfaces assume a variety of functions for their mechanical and structural characteristic but also for aesthetics that they present: in fact, they often constitute external “skins” (in jargon called skin), external or surface of the underlying structure.
The above image reports a sequence of Responsive Surfaces that were studied and constructed for the Bahari Towers, built and opened in August 2013 in Abu Dhabi, with the purpose of moderating the solar irradiation on the surface of the two towers by activating a system of energy saving and recycling by harnessing the light of the sum.
However this thesis project strives to underline, rather, the concept of texture; repetition of a module that creates a rhythm in the structure, a sort of geometric pattern intrinsic in the structure, that which integrates with the architecture itself, instead of composing an overlying, independent layer.
Concept: Responsive Surface
Here is the motivation of the choices previously introduced: a structure that inherently and structurally possesses the ability to change its shape generates a dynamic architecture, versatile and functional depending on the purpose it must assume.
The innovate aspect falls mainly on the compositional techniques of this product’s typology: to obtain in the responsive surface from the grid above, it was necessary to model the shape with Rhino and Grasshopper, which allow a type of parametric approach to the project.
Thanks to Grasshopper, it was possible to model a surface able to open or close in function of some variable parameters defined by external input (see the image below di Rodrigo Medina).


The composition of the kinetic model
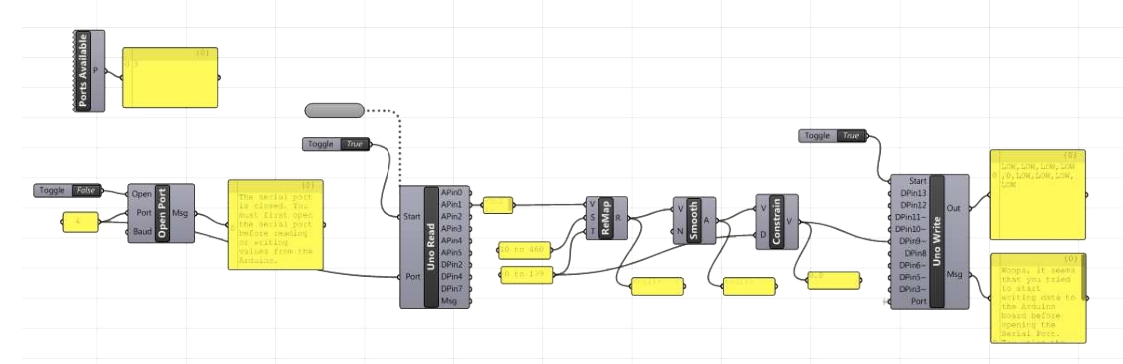
The image below represents a synthesis of the whole thesis project in regards to the virtual part of the structure’s modeling, the composition of the kinetic model.
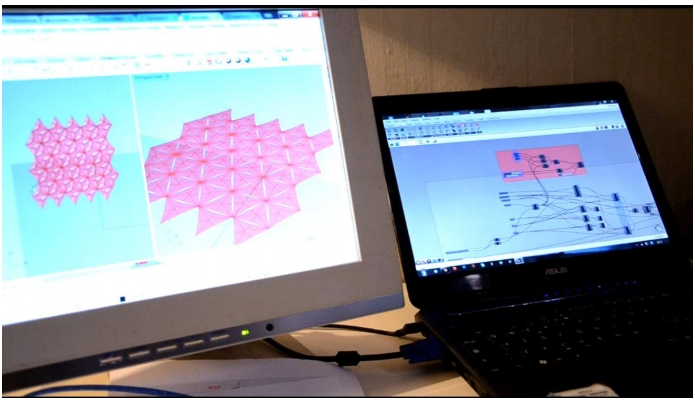
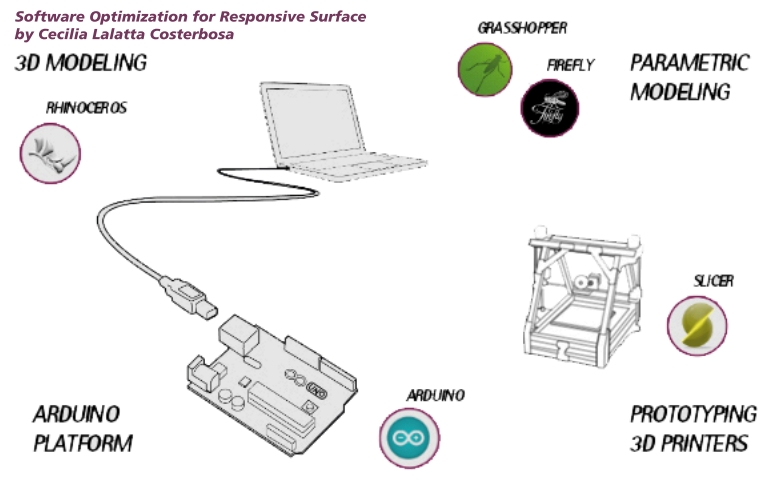
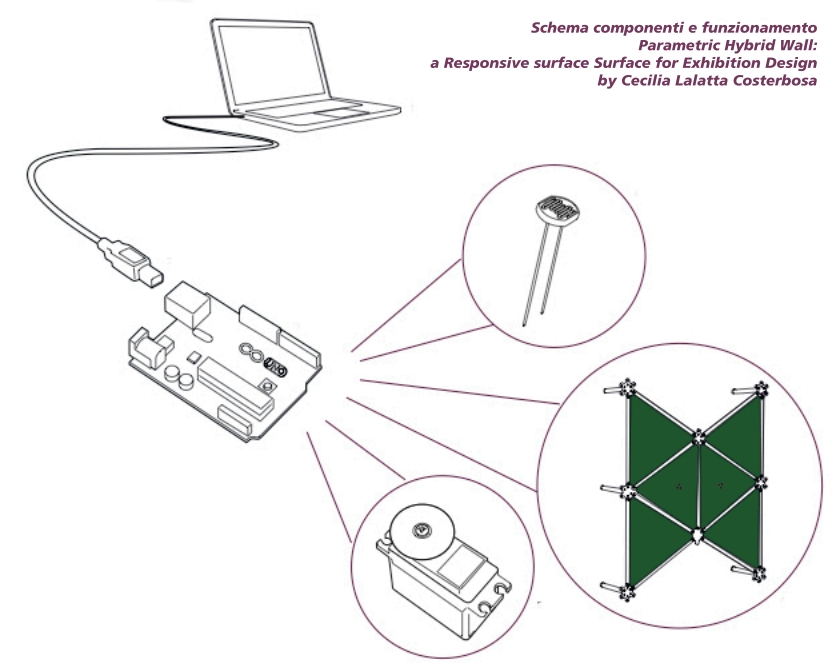
The various components (identified by the gray boxes) represent the construction of the model in 3D as well as the associated links in between. It is possible to manage all elements of this project via Grasshopper: from the quantity of modules to their openings or closings to the defined inputs from the sensor and the outputs sent by the motor, they are all controlled from several specific components run by Arduino by Grasshopper.

The images above make evident the passage that allows the connection between Grasshopper and Arduino: Using the Port, after connecting Arduino to a computer, will start the exchange of information in the Input and Output signals. Arduino not only joins the 3D model with the platform but also ties the reactions of the sensor to the server, which in turn are linked to the variable parameters of the modeled structure.It then creates a circuit that permits the connection of the actual reaction, determined by the difference in light, received by the sensor (Input), through a transmission to the server that, being connected to the model, responds with movement of the structure.
The surface shapes itself differently depending on the stimuli which are related to a spectrum of variables classified as sensors. The deformation of the surface happens subsequently to the received impulse: the dynamism of these structures is then the result of the interaction between the end-user, who acts upon the sensors, and the surface, which modifies its own shape after having been subjected to the stimuli of the sensors.
Below the figure shows a diagram of the components in Grasshopper used to manage the openings of the Responsive Surface via Wi-Fi.

Touch OSC is software for controlling MIDI and OSC via devices such as iPhones, smartphones and tablets. The interface consists of a series of touch controls that send and receive messages directly to the structure.If inserted in the circuit above, this Plug-in will link the device directly to the structure by means of a sketch composed in Arduino.
The image shown below, is a snap of the interface.

The user is then able to interact with the structure, which will react to the inputs sent directly from the user’s device.
Mechanical Phase
The mechanics of the prototype were affected as a function of the shape previously modeled in 3D. Realizing the mechanical part was necessary to model the ad hoc profiles, which were designed, even in this case, with Rhinoceros.
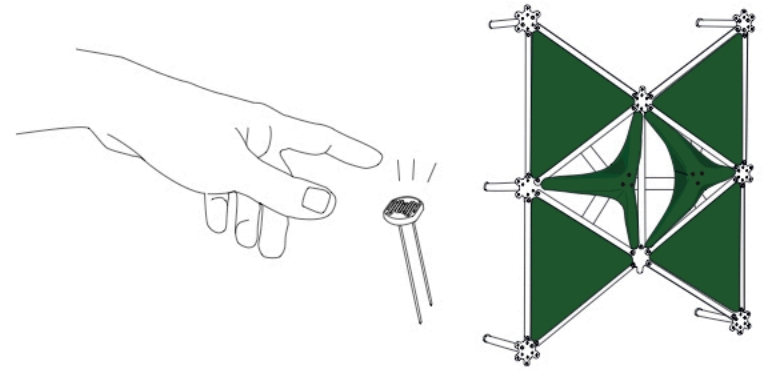
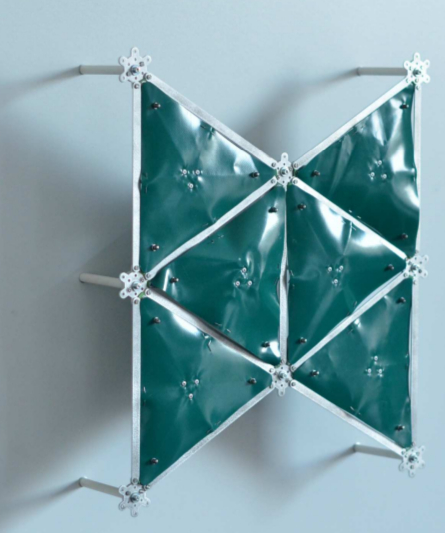
The prototype is composed modularly with elements that can be assembled in a triangular shape.
The base of the triangle (A) is preceded by the grid in the way discussed before. The triangle is in turn subdivided into three triangles (A1, A2, A3) generated by the meeting of the midpoints of each side. This point of intersection defines the axis on which movements takes place that allows the system of opening and closing consisting of A1, A2 and A3.
This approach allows the scalability of the project in order to adapt it to any project proposal.

To download the project book:
{kind=link}
Next Exhibition
The project will be exhibited in December in Doha in Qatar (read here).
Related Articles: